
3.1 Model Conceptualization, Assumptions, and Limitations .....3.1.1 Vadose Zone Leaching .....3.1.2 Saturated Zone Mixing .....3.1.3 Groundwater Flow System 3.2 Theoretical Background .....3.2.1 Vadose Zone Transport .....3.2.2 Saturated Zone Mixing .....3.2.3 Groundwater Flow System 3.3 Numerical Implementation .....3.3.1 Vadose Zone Leaching .....3.3.2 Saturated Zone Mixing .....3.3.3 Groundwater Flow System 3.4 Program Structure and Operation .....3.4.1 Input Parameters .....3.4.2 Input Data Format 3.5 Comparison between VG Model and VLEACHSM 1.0a .....3.5.1 Descriptions of Example Problem .....3.5.2 Results 3. MODEL DEVELOPMENT3.1 Model Conceptualization, Assumptions, and LimitationsAny mathematical model involves a simplification of real-world systems with the degree of simplification being inversely proportional to the sophistication of the model. Simpler models require more significant idealization of the real-world system. The Vadose-Groundwater Model (VG Model) is a relatively simple model intended primarily for screening contaminant level estimation within the solute transport phenomena in the subsurface. In this section, the assumptions and limitations are separately discussed for the vadose zone and saturated zone modules. 3.1.1 Vadose Zone LeachingThe movement of an organic contaminant in the vadose zone can be described within and among three different phases: (1) as a solute dissolved in water, (2) as a gas in the vapor phase, and (3) as an adsorbed compound in the solid phase (see Figure 2.2). Equilibration among the phases occurs according to distribution coefficients defined by the user. Contaminant decay was incorporated in the model assuming a uniform decay rate for the three different phases of the user selected chemical. The first part (vadose zone leaching) of the VG model simulates vertical transport through vertically heterogeneous soil layers by advection and dispersion in the liquid phase and by gaseous diffusion in the vapor phase. These processes are conceptualized as occurring in a number of distinct, user-defined soil columns, which are vertically divided into a series of user-defined cells within each layer. The soil columns and layers may differ in soil properties, recharge rate, and depth to water. Within each soil column heterogeneous conditions are assumed due to differences in soil properties among different geologic layers and also in contaminant concentration (see Figure 3.1). During each time step intervals the migration of the contaminant through each cell in the soil column is calculated. Hence, the first part of the VG model can account for heterogeneity both laterally and vertically. The numbers of columns and layers employed in the simulation have a mathematical capability of 50 and 1000, respectively.
Contaminant transport processes in the subsurface are simulated after the first part of the VG model has calculated contaminant equilibrium concentration in the liquid and vapor phases based on the user provided initial solid-phase concentration [mg/Kg]. Calculations of advective and dispersive transport of contaminants in solution are based on the assumed parameter values. The advective vapor flow in the soil is assumed to be small and is therefore neglected. Therefore, contaminants in the vapor phase diffuse between adjacent cells based upon the calculated concentration gradients. After contaminants have equilibrated among three phases, the total mass in each cell is calculated. These steps are conducted for each selected time interval, and each soil column is simulated independently assuming no horizontal mass transfer between columns. For computational purposes each soil column is divided into a series of cells. When developing a model simulation, it is important to fully understand the implications of the first part of the VG model conceptualization. The following assumptions are made in the conceptualization of the first part of the VG model in the vadose zone.
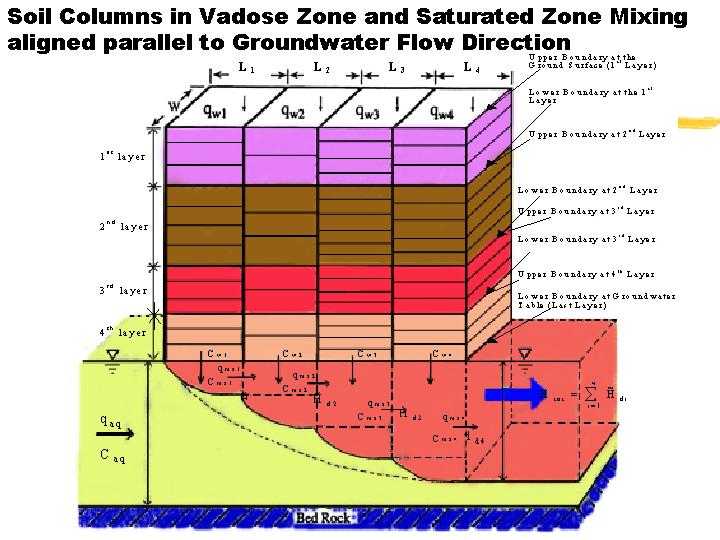
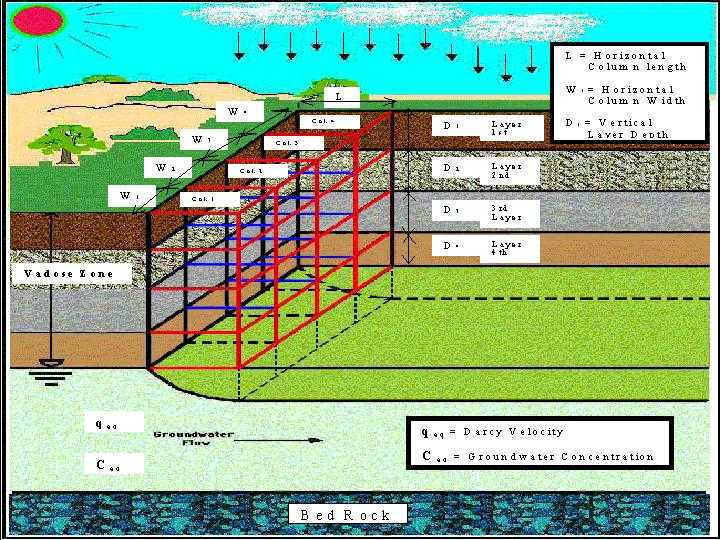
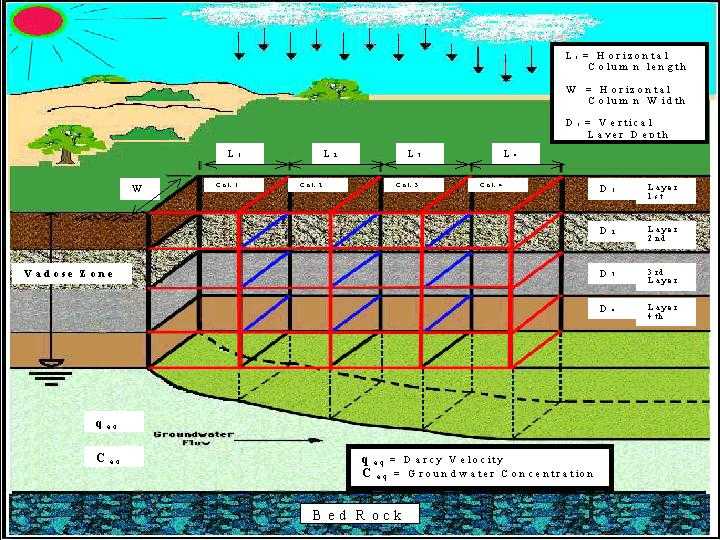
3.1.2 Saturated Zone MixingThe leachate from the vadose zone will reach groundwater in the saturated zone and will be mixed. In the second part (saturated zone mixing) of the VG model, this mixing process is simulated by employing a mass-balance principle. For the purpose of mixing calculation in the saturated zone, the conceptual vadose zone soil columns are assumed to be arranged in one of two ways. To represent a contaminant source in the soil, a group of vertical soil columns can be arranged at either transverse or parallel alignment to the groundwater flow direction (see Figures 3.2 and 3.3). For the transverse arrangement (Figure 3.2), each soil column is treated independently both in the vadose and in the saturated zones. For the parallel case (Figure 3.3), only the vadose zone migration in each column is treated independently. For the saturated zone mixing, for the parallel case, the up-gradient mixed concentration is used as influent concentration for estimating the next down-gradient column's concentration. In both cases, the bottom of each soil column is assumed to be parallel to the water table.
For the screening level mixing calculation, the following assumptions are made in the development of the second part of the VG model.
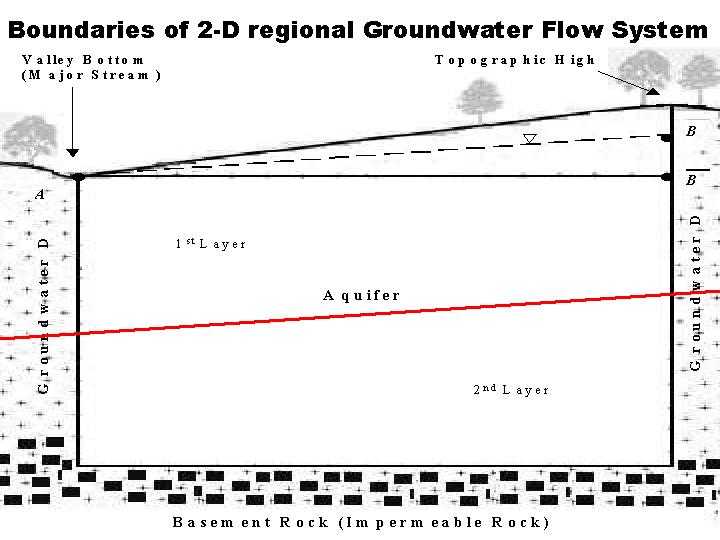
3.1.3 Groundwater Flow SystemGroundwater flow models involving Laplace's equation and suitable boundary conditions are described by Toth (1962). He was able to draw conclusions about the configuration of regional groundwater systems by using a mathematical model. Figure 3.4 represents a cross section through a small watershed bounded on one side by a topographic high, which marks a regional groundwater divide, and on the other side by a major stream, which is a groundwater discharge area and marks another regional groundwater divide. The aquifer is assumed to consist of heterogeneous, isotropic, porous material underlain by impermeable rock.
The
left and right groundwater divides can be represented mathematically as
impermeable, no-flow boundaries. Although no physical barrier exists, a
groundwater divide has the same effect as an impermeable barrier because no
groundwater crosses it. Groundwater to the right of the valley bottom
discharges at point A, and groundwater on either side of the topographic high
flows away from point B. The lower boundary is also a no-flow boundary
because the impermeable basement rock forms a physical barrier to flow. The
upper boundary of the mathematical model is the horizontal line A In an undeveloped watershed, the fluctuations of the water table position can assume that the system is at a steady state on an annual basis, usually the U.S. Geological Survey water year (1 October to 30 September). The water table position at the beginning of the year is the same as the position at the end of the year; there was no net accumulation or loss of water from the system, viz, storage change.
3.2 Theoretical BackgroundIn this section, a brief theoretical development of the Vadose-Groundwater model (VG model) is presented for vadose zone transport, saturated zone mixing, and groundwater flow net.
3.2.1 Vadose Zone TransportIf we consider three equilibrium phases of pollutants in an unsaturated soil column, its one-dimensional heterogeneous governing transport equation is expressed as follows:
where Cw is concentration of a contaminant in liquid (water) phase [mg/L]. Ca is concentration of a contaminant in vapor (air) phase [mg/L]. Cs is concentration of a contaminant in solid phase [mg/Kg]. qw is volumetric water content (volume of water / total volume) [ft3/ft3]. qa is air-filled porosity (volume of air / total volume) [ft3/ft3]. Note that the total porosity n equals the sum of water filled porosity and air filled porosity. qw is water flow velocity (recharge rate) [ft/yr]. The air flow velocity (qa) is assumed to be zero in this study. Dw is dispersion coefficient for the liquid phase contaminant in the pore water [ft2/yr]. Da is gaseous phase diffusion coefficient in the pore air [ft2/yr]. mw is first order decay rate of a contaminant in water phase [1/yr]. ma is first order decay rate of a contaminant in gaseous phase [1/yr]. ms is first order decay rate of a contaminant in solid phase [1/yr]. In this model, for simplicity, it is assumed that mw = ma = ms = m. rb is bulk density of the soil [gr/cm3]. z is vertical coordinate with positive being downward. t is time [yr]. Instantaneous equilibrium (partitioning) of the contaminant among the phases is assumed to be realized according to the following linear relationships: Liquid-solid phase equilibrium is
Liquid-gas phase equilibrium is
where Kd [ml/g] is the distribution coefficient between the solid phase and liquid phase, and H (H = KH /(RT), [dimensionless]) is the partition coefficient between the air phase and water phase. Using the empirical relationship, Kd can be expressed as Kd = Koc·foc, where Koc [ml/g] is the organic carbon-water partition coefficient and foc [g/g] is the fraction organic carbon of the soil. The dimensionless form of the Henry's partition coefficient, H, can be determined from the more common form having the units of atmospheres-cubic meters per mole [atm-m3/mol] using the following equation
where KH [atm-m3/mol] is the dimensional form of Henry's Law constant, R is the universal gas constant (R = 8.2 · 10-5 [atm-m3/mol·K]), and T is the absolute temperature [°K = 273.16 + °C]. The dispersion coefficient, Dw, in the unsaturated zone is regarded as a linear function of the pore water velocity as the equation (2.13). The scale-dependent dispersivity is the equations (2.14) and (2.15). The equations (2.14) and (2.15) can be rewritten for the English unit as:
It should be recognized that dispersion remains a significant uncertainty in the modeling effort. Considerable debate exists regarding the appropriate practical treatment of field-scale dispersion. In general, field tests are the only methods by which reasonable estimates for dispersion can be obtained. The gas phase diffusion coefficient (Da) in the porous medium is calculated by modifying the free air diffusion coefficient using the Millington model (Millington, 1959):
where Dair is the diffusion coefficient of the contaminant in the free air, and n is the total porosity of the soil. By substituting equation (3.2) and (3.3) into (3.1), and neglecting the air flow velocity (qa = 0), the governing transport equation can be simplified as:
If we set as
By substituting equations (3.9) and (3.10) into (3.8)
The equation (3.11) can be rewritten as:
Initial and Boundary ConditionsTo solve equation (3.12), initial and boundary conditions are required as follows.
where Cs(z,0) is the initial solid-phase concentration specified by the user. When the distribution coefficient (Kd = Koc· foc) is zero, liquid-phase concentration must be entered as an initial concentration to avoid the program run-time error (division by zero). The most common type of boundary condition to be applied at the top of the soil column is either the first type (Dirichlet's) or the third type (Cauchy's) as shown below.
or
where C0 is the liquid phase solute concentration in the infiltration water, g is the decay rate [1/yr] of the solute source due to either degradation or flushing by the infiltration, and t0 is the duration of solute release [yr] which can be selected to simulate continuous input. At the bottom of the soil column, the second type boundary condition (Neuman's) is applied.
In applying this boundary condition, equation (3.19) is actually implemented at a finite column length (i.e., z is not infinity). To reduce the finite length effect, dummy cells are added at the bottom of the soil column automatically in the numerical calculation in the model. After evaluation of Cw(z,t), the total contaminant mass per unit volume of the soil is calculated as:
3.2.2 Saturated Zone MixingAfter estimating the liquid phase solute concentration (Cw) at the bottom of the soil column, the mixed concentration in the aquifer can be calculated using a mass-balance technique as below (USEPA, 1989; Summers et al., 1980):
where Caq is the concentration of horizontal groundwater influx, qaq is the Darcy velocity in the aquifer, Aaq is the cross-sectional aquifer area perpendicular to the groundwater flow direction, and Asoil is the cross-sectional area perpendicular to the vertical infiltration in the soil column. The aquifer area (Aaq) is determined by multiplying the horizontal width of the soil column with the vertical solute penetration depth. As discussed in Section 3.1.2, Saturated Zone Mixing, the procedure for the mixing calculation is different depending on the type of soil column arrangement. In the case of the transverse (right angle) arrangement, the mixing calculation is straight forward: simply apply equation (3.21) at each mixing element underneath the soil columns. For the parallel arrangement case, however, the mixed concentration at the upgradient cell is considered as an influx concentration to the next cell (see Figure 2.3). The mixing concentration at the next cell is estimated by re-applying equation (3.21) using the two inflow concentrations: one from the effluent from the upgradient cell and the other from the leaching from the soil column. Solute Penetration DepthThe solute penetration depth is the mixing thickness of the contaminant in the aquifer beneath the soil column. An estimation of the plume thickness in the aquifer can be made using the relationship below (adapted from USEPA, 1990a):
where, Hd is the penetration depth [ft], av is the transverse (vertical) dispersivity [ft] of the aquifer, L is the horizontal length dimension of the waste [ft], and B is the aquifer thickness [ft]. In equation (3.22) the first term represents the thickness of the plume due to vertical dispersion and the second term represents that due to displacement from infiltration water. When implementing this relationship, it is necessary to specify that in the event the computed value of Hd is greater than B, the penetration thickness, Hd is set equal to B (USEPA, 1990a). Assumptions and Limitations Associated with the Penetration Depth EstimationThe method introduced in equation (3.22) is based on two major assumptions (refer to Appendix D for its derivation) and, therefore, has subsequent limitations. First, in estimating the dispersive penetration depth, there are two dispersion components in the mixing zone: one from the transverse (z-directional) dispersion by the horizontal groundwater velocity, and the other from the longitudinal (z-directional) dispersion by the infiltration velocity. In the first term of equation (3.22), however, the longitudinal dispersion due to infiltration is neglected by assuming that the horizontal groundwater velocity is much greater than the infiltration velocity. Therefore, when the horizontal groundwater velocity is not substantially greater than the vertical infiltration velocity, the equation underestimates the penetration depth and overestimates the mixed concentration. Secondly, the second term in equation (3.22), the advective penetration depth due to infiltration, is based on the assumption that the vertical (infiltration) velocity varies linearly with aquifer depth, with a maximum value at the top of the water table (i.e., at the bottom of the soil column) and zero at the bottom of the aquifer. In case of either large aquifer thickness or higher horizontal velocity compared to the vertical, the vertical component of groundwater velocity becomes zero before the infiltration water reaches the bottom of the aquifer. In this case, the equation (3.22) overestimates penetration depth and, subsequently, underestimates the mixed concentration. Due to the assumptions and limitations discussed above, the user must be careful when using the equation (3.22). Whenever field data are available, the measured solute penetration depth should be used instead of the equation. Otherwise, the input parameter values must be checked to see whether the assumptions are valid. For example, compare the horizontal and vertical groundwater velocities to ensure the horizontal velocity is much larger than the vertical one (e.g., 10 times greater). In the second part of the VG program, an option is provided to choose either the measured penetration depth or to estimate the depth based on the aquifer parameter values. Adjustment of the Estimated Penetration DepthNo adjustment of the penetration depth is required when either the depth is measured in the field or the soil columns are arranged at right angle to the horizontal groundwater flow direction. For the parallel arrangement, however, when the penetration depth needs to be estimated by the equation (3.22), the estimated depth is adjusted as follows. As shown in the example (Fig. 2.3), the total source dimension (L) is subdivided into four segments (L1 through L4) and the penetration depth for each soil column is calculated as:
where
the subscript i represents column 1 through 4. Since the relationship between
L and Hd is not linear in the equations (3.22 and 3.23), the sum of
individual penetration depths based on the segment length is different from the
overall penetration depth (i.e., Hd
where
Consequently, the relationship between the adjusted and individual penetration depth is expressed as:
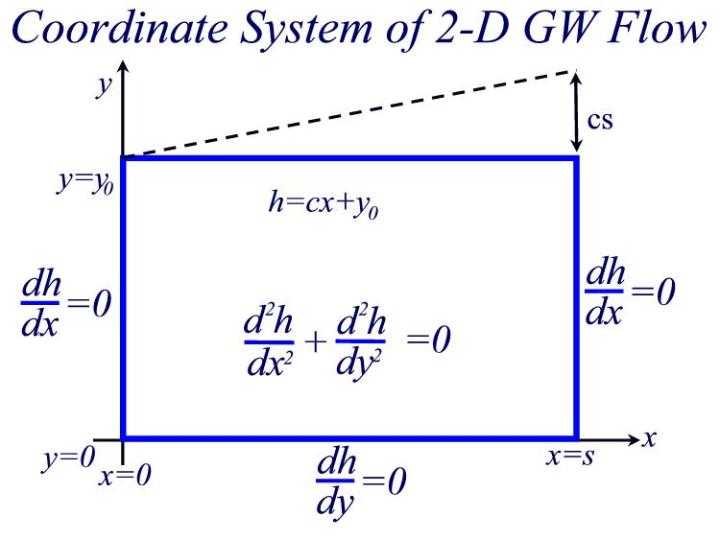
3.2.3 Groundwater Flow SystemGoverning Equation and VisualizationThe two-dimensional generalization of Darcy's law requires that the one-dimensional form be true for each of the x and y components of flow as the equations (2.17) and (2.18). The two-dimensional continuity equation for steady-state conditions is equation (2.19). Laplace's equation combines Darcy's law and the continuity equation into a single second-order partial differential equation. Darcy's law, equations (2.17) and (2.18), is substituted component by component into equation (2.19) to give the equation (2.20). If we assume horizontal hydraulic conductivity is much bigger than vertical hydraulic conductivity and constant, then equation (2.20) becomes equation (2.21) and the hydraulic conductivity in this governing equation is horizontal hydraulic conductivity, K. Toth (1962) assumed that, in an undeveloped watershed, the fluctuations of the water table on an annual basis were small. That is, he used an average water table position and assumed that the system was at a steady state on an annual basis. The water table position at the beginning of the year was the same as the position at the end of the year; there was no net accumulation or loss of water from the system. Therefore, with this idealization, the two-dimensional Laplace equation (2.21) is the required governing equation. The mathematical model, consisting of the governing equation together with the four boundary conditions, is summarized in Figure 3.5. Because qx and qy satisfy equation (2.19) and thus (2.21), they can be expressed in the following forms:
where V(x,y) is called the flow function. For visualization of the flow patterns, we have to define the flow rate vectors in x- and y-directions. If h function is given flow rate vector (qx, qy) can be calculated from equations (2.17) and (2.18). Then, V(x,y) can be calculated from equations (3.26) and (3.27). Boundary ConditionsThe coordinate system of Figure 3.4 is defined in Figure 3.5. An equation is required for each boundary. The upper boundary is located at y = y0 for x ranging from 0 to s. The distribution of head along this boundary is assumed to be linear. The equation for a linear variation such that h(0,y0) = y0 is h(x,y0) = cx + y0 for 0<x<s, where c is the slope of the water table. The specification of head along the upper boundary makes it Dirichlet (first) boundary condition.
The other three boundary conditions are for no-flow boundaries. Darcy's law relates flow to gradient of head. Along a vertical, no-flow boundary, qx = 0 implies dh/dx = 0, and along a horizontal, no-flow boundary, qy = 0 implies dh/dy = 0. Specification of flow across these three boundaries makes them Neumann (second) boundary conditions. The full set of boundary conditions is written as:
The two dimensional Laplace equation, d2h/dx2 + d2h/dy2 = 0, is the required governing equation as mentioned earlier. The mathematical model, consisting of the governing equation together with the four boundary conditions, is summarized in Figure 3.5. Last modified: Oct 15, 1999 VG Model / Samuel Lee / VADOSE.NET |


{kind=link}
{kind=link}